- TOP>
- Protect>
- Efforts of JNCAP>
- Car Assessment>
- Preventive safety performance>
- Test Procedures and Evaluation Methods for Autonomous Emergency Braking System (AEBS)
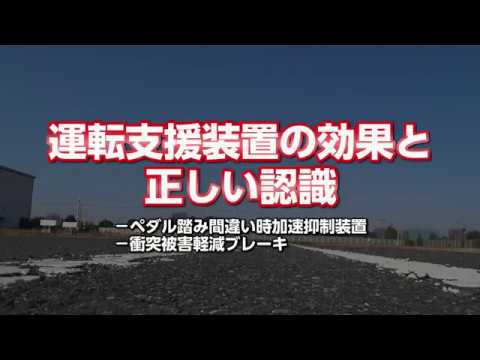
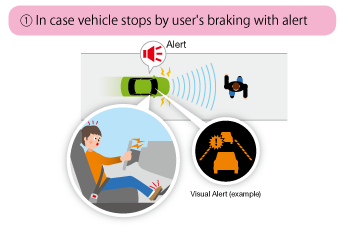
AEBS is the system which detects forward objects using camera, radar, etc., and alerts visually or auditorily to urge a driver to avoid collision by applying the brake, and if no action is taken by a driver and collision is likely to happen, it brakes automatically.
At Japan New Car Assessment Program, safety performance of AEBS is tested and evaluated for the following targets.
However there is a condition as noted in the caution page. (Refer to the note.)
A test vehicle traveling toward a pedestrian target crossing the road with10 to 60 km/h speed range, the warning and AEBS system is assessed.
The tests are carried out in two scenarios. One is to cross the road in clear visibility, and the other is to cross the road from behind of the car parked. Points are obtained for the case that collision is avoided or collision speed is reduced by AEBS.

A test car traveling at a speed of 30–60 km/h approaches a target simulating a pedestrian crossing a night road with street lamp to investigate the operational condition of an alarm and an advanced emergency braking system.
Tests are conducted assuming two types of traffic environments: crossing a road with good visibility and crossing a road from the rear side of an oncoming vehicle.
Even when a collision was avoided similarly in the daytime or a collision occurred, points are given considering the reduction in speed before the collision. The test is conducted at night, and the environment with a street lamp is simulated.

A test car traveling at a speed of 30–60 km/h approaches a target simulating a pedestrian crossing a night road without street lamp to investigate the operational condition of an alarm and an advanced emergency braking system.
Tests are conducted assuming two types of traffic environments: crossing a road with good visibility and crossing a road from the rear side of an oncoming vehicle.
Even when a collision was avoided similarly in the daytime or a collision occurred, points are given considering the reduction in speed before the collision. The test is conducted at night, and the environment without a street lamp is simulated.

A test car traveling at a speed of 10 to 60 km/h approaches a bicycle target crossing or going straight ahead on the roadto check the operational conditions of of the warning and the AEBS.
The tests are carried out in scenarios that simulate three types of traffic environment:
- (CBL scenarios) the test car approaches a bicycle target travelling at 15 km/h from behind
- (CBF scenarios) the test car approaches a bicycle target that is crossing the road from the right side in clear view.
- (CBNO scenarios) the test car approaches a bicycle target that is crossing the road from the lefet side behind the obstruction wall.
Points are scored based on whether the collision is avoided or collision speed is reduced by AEBS.

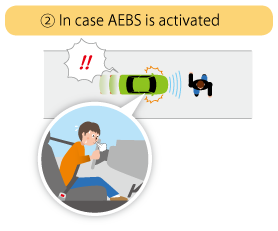
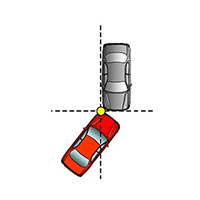
The operating status of alarm and AEBS is checked when a test vehicle turning right at 10 to 20 km/h approaches an on-coming vehicle target going straight at 30 to 60 km/h.
The types of collisions between the test vehicle and the vehicle target are the following two scenarios (Collision point ① or ②) which take into account the actual accidents etc. in Japan. The test is carried out under either of the two scenarios chosen by vehicle manufacturers.
Points are scored based on whether the collision is avoided or how much speed is reduced even if collision occurs by operation of alarm or AEBS.

The operating status of alarm and AEBS is checked when a test vehicle turning right at 10 to 30 km/h or turning left at 10 to 20 km/h approaches a pedestrian target.
The tests are carried out in four types of scenarios simulated as below.
Points are scored based on whether the collision is avoided or how much speed is reduced even if collision occurs by operation of alarm or AEBS.

A test vehicle collides to a target at a speed of 10 to 60 km/h from behind and AEBS is evaluated with the result.
The test scenarios are carried out in two ways. One is to collide into stationary unmoving target. The other is to collide into a moving target at 20 km/h. Points are obtained for the case that collision is avoided or collision speed is reduced by AEBS.

”AEBS" is the system in a vehicle to alarm and brake by detecting objects such as car, pedestrian and bicyclist in front of the vehicle. It is assumed that the driver drives safely.
Speed condition and recognizable range which the system operates depend on the way of the detection and car model.
Also, the system may not work or obtain sufficient effect depending on circumstances such as weather condition, road surface condition, conditions of a pedestrian or a bicyclist, etc.,. (※)
Please check instruction manuals well, don't rely on the system too much to drive safely.